|
ГЛАВНАЯ
> Вернуться к содержанию
Кибернетика и программирование
Правильная ссылка на статью:
Галемов Р.Т., Масальский Г.Б.
Планирование траектории манипулятора для движущейся цели
// Кибернетика и программирование.
2018. № 2.
С. 9-28.
DOI: 10.25136/2644-5522.2018.2.25478 URL: https://nbpublish.com/library_read_article.php?id=25478
Планирование траектории манипулятора для движущейся цели
Галемов Руслан Тахирович
аспирант, кафедра робототехники и технической кибернетики, Сибирский Федеральный Университет
660041, Россия, Красноярский край, г. Красноярск, проспект Свободный, 79
Galemov Ruslan Takhirovich
graduate student, Department of Robotics and Technical Cybernetics, Siberian Federal University
660041, Russia, Krasnoyarskii krai, g. Krasnoyarsk, prospekt Svobodnyi, 79

|
galemovruslan@gmail.com
|
|
 |
Другие публикации этого автора
|
|
|
Масальский Геннадий Борисович
кандидат технических наук
профессор, кафедра робототехники и технической кибернетики, Сибирский федеральный университет
660041, Россия, Красноярский край, г. Красноярск, проспект Свободный, 79
Masalsky Gennadiy Borisovich
PhD in Technical Science
Professor, Department of Robotics and Technical Cybernetics, Siberian Federal University
660041, Russia, Krasnoyarskii krai, g. Krasnoyarsk, prospekt Svobodnyi, 79
|
|
gmasalsky@sfu-kras.ru
|
|
|
|
DOI: 10.25136/2644-5522.2018.2.25478
Дата направления статьи в редакцию:
17-02-2018
Дата публикации:
11-03-2018
Аннотация:
Представлен модифицированный комбинированный поисковой метод для решения обратной задачи кинематики многозвенного манипулятора в условиях движения цели. Использован генетический алгоритм для первоначального приближения к цели и симплексный поиск для улучшения результатов генетического алгоритма. Компенсация влияния движения цели на целевую функцию основана на оценках дрейфа цели по каждой оси рабочего пространства. Эти оценки используются для вычитания вклада дрейфа в целевую функцию, что повышает эффективность поиска. Вычисление оценок производилось рекуррентным методом наименьших квадратов. Проведены эксперименты на математических моделях плоских и пространственных, кинематически избыточных и не избыточных многозвенных манипуляторах. Результаты показали, что для всех вышеуказанных манипуляторов возможно планирование траектории по положению и ориентации рабочего органа, а построенные траектории в обобщенных координатах плавные и не имеют скачкообразных изменений. Комбинированный поисковой метод находит решение обратной задачи кинематики за одну итерацию процедуры поиска благодаря глобальным свойствам генетического алгоритма и эффективности симплексного поиска.
Ключевые слова:
робототехника, многозвенный манипулятор, планирование траектории, обратная задача кинематики, комбинированный поисковой метод, движущаяся цель, оценка скорости дрейфа, оптимизация, компенсация целевой функции, дрейф целевой функции
Abstract: Authors present a modified combined search method for solving the inverse problem of the kinematics of a multi-link manipulator under conditions of target motion. A genetic algorithm was used for the initial approximation to the goal and simplex search to improve the results of the genetic algorithm. Compensation of the effect of the movement of the target on the objective function is based on estimates of the drift of the target along each axis of the working space. These estimates were used to subtract the contribution of drift to the objective function, which improves search efficiency. The estimates were calculated by the recursive least squares method. Experiments were carried out on mathematical models of planar and spatial, kinematically redundant and non-redundant multi-link manipulators. The results showed that for all the above manipulators it is possible to plan the trajectory according to the position and orientation of the working member, and the constructed trajectories in the generalized coordinates are smooth and do not have abrupt changes. The combined search method finds the solution of the inverse kinematics problem for one iteration of the search procedure due to the global properties of the genetic algorithm and the efficiency of the simplex search.
Keywords: robotics, multilink manipulator, trajectory planning, inverse kinematics problem, hybrid search method, moving target, drift estimation, optimization, objective function compensation, objective function drift
Введение
Можно выделить три подхода к решению задачи слежения рабочим органом манипулятора за движущейся целью: построение траектории через инвертированный Якобиан, планирование маршрута в пространстве состояний и интеллектуальные подходы к решению обратной задачи кинематики. Метод инвертированного Якобиана является одним из самых распространенных способов решения обратной задачи кинематики (ОЗК) манипулятора [1],[2]. Он используется в системах управления, основанных на отслеживании цели средствами технического зрения [3]-[10].
Планирование маршрута в пространстве состояний использует алгоритмы поиска пути. Здесь широко применяется метод быстрорастущих случайных деревьев [11]. Один из подходов к решению задачи построения траектории заключается в нахождении целевых конфигураций манипулятора с помощью грубого решения ОЗК и построения пути от начальной до целевой конфигурации, используя быстрорастущие случайные деревья [12],[13]. Другой подход основан на поиске пути с использованием эвристик, направляющих поиск к более предпочтительной цели [14],[15]. Именно этот подход используется для слежения за движущейся целью [16].
Нейронные сети приобрели широкое распространение в решении ОЗК и планирования пути. Они могут обучаться как на моделях, так и во время работы манипулятора. С их помощью строятся траектории в пространстве конфигураций по требуемым положениям в рабочем пространстве. Классическое обучение с обратным распространением ошибки, когда на вход подавался вектор положений рабочего органа манипулятора, а на выходе получался вектор обобщенных координат, показывало большое время обучения и большую ошибку [17]. Поэтому были предложены работающие параллельно нейронные сети [18], среди которых выбиралось лучшее решение. Также для каждой обобщенной координаты использовались независимые нейронные сети [19]. Другой подход подразумевал изменение алгоритмов обучения, так в [20] использовался метод электромагнетизма [21]. В [22] предложено обучать нейронную сеть на небольшом связанном участке рабочего пространства и записывать веса сети в таблицу поиска. Количество таблиц равно количеству участков и выбор таблицы обусловлен текущим положением цели.
Среди интеллектуальных алгоритмов, используемых для планирования пути, также распространены генетические алгоритмы (ГА). В [22] показана способность ГА решать ОЗК. В [23] сравниваются способы кодирования «особей» обобщенных координат при планировании пути. Результаты показали, что при бинарном кодировании траектория имеет частые выбросы обобщенных координат, тогда как числовое кодирование дает гладкую траекторию. В [24] представлено применение обратной связи в генетическом алгоритме. При таком подходе популяция состоит не из конфигураций манипулятора, а из смещений рабочего органа на основе которых получают смещения обобщенных координат. В [25] показан подход, сочетающий генетический алгоритм с алгоритмом имитации отжига, который настраивает вероятности скрещивания и мутации.
В данной статье рассматривается задача слежения рабочего органа манипулятора за движущейся целью. Это достигается путем решения обратной задачи кинематики в каждый момент времени. Решение ОЗК производится комбинированным поисковым методом (КПМ), представляющим из себя комбинацию генетического алгоритма и симплексного поиска. Поскольку цель движется непрерывно, то слежение за движущейся целью можно рассматривать как задачу оптимизации с дрейфующим экстремумом. Здесь предлагается модификация КПМ, способная решать обратную задачу кинематики с движущейся целью.
Прямая и обратная задачи кинематики манипулятора
Решениепрямой задачи кинематики(ПЗК) для манипулятора, при известной структуре, есть расчет изменения координат рабочего органа (РО) относительно координат основания в рабочем пространстве при известных углах поворота его сочленений. В общем виде эта задача выглядит следующим образом:
 , (1) , (1)
где q – вектор  обобщенных координат (углов поворота в звеньях) манипулятора; обобщенных координат (углов поворота в звеньях) манипулятора;  – матрица размерности – матрица размерности  , здесь r – вектор, размерности , здесь r – вектор, размерности  , положения РО рабочем пространстве , положения РО рабочем пространстве  ; ;  – матрица размерности – матрица размерности  , где , где  , ,  , ,  – векторы, размерности – векторы, размерности  , составляющие локальную систему координат РО манипулятора в рабочем пространстве . Компоненты матрицы Т представлены на рисунке 1. Обозначим , составляющие локальную систему координат РО манипулятора в рабочем пространстве . Компоненты матрицы Т представлены на рисунке 1. Обозначим  и и  степени свободы РО на перемещение и вращение соответственно. Величина степени свободы РО на перемещение и вращение соответственно. Величина  зависит от конструкции манипулятора. Для планарного манипулятора зависит от конструкции манипулятора. Для планарного манипулятора  т. к. РО может двигаться вдоль двух осей и вращаться вокруг одной оси. Максимальное значение т. к. РО может двигаться вдоль двух осей и вращаться вокруг одной оси. Максимальное значение  , тогда РО может перемещаться и вращаться по трем осям Декартовой системы координат. , тогда РО может перемещаться и вращаться по трем осям Декартовой системы координат.
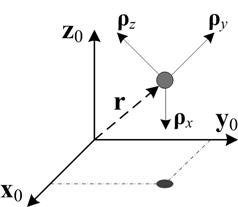
Рис. 1 – Рабочее пространство манипулятора
Решение прямой задачи кинематики манипулятора начинается с присвоения каждому сочленению локальных систем координат, начиная с основания манипулятора. Каждая локальная система координат описывается положением и ориентацией текущего сочленения по отношению к предыдущему. Положение и ориентация описываются параметрами Денавита-Хартенберга. Список и значения параметров представлены в таблице 1.
Таблица 1– Параметры Денавита–Хартенберга
|
Параметр
|
Значение
|
|

|
Угол между осями  и и  вокруг оси вокруг оси 
|
|

|
Угол между осями и  вокруг оси вокруг оси
|
|

|
Расстояние между осями и вдоль оси x
|
|

|
Расстояние от основания i–1 системы координат до оси вдоль
|
|

|
Тип сочленения: 1– призматическое, 0–вращательное.
|
Эти параметры используются для формирования матриц трансформации. Положение и ориентация системы координат i-го сочленения по отношению к (i-1)-му сочленениюописывается матрицей трансформации:
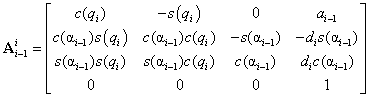 , (2) , (2)
где  , ,  . .
Решение прямой задачи кинематики находится из трансформации n-го сочленения по отношению к основанию манипулятора
 . (3) . (3)
Матрица Т извлекается из  . .
Обратная задачи кинематики(ОЗК) служит для поиска углов в сочленениях манипулятора q при известной матрице T РО и выводится из (1)
 . (4) . (4)
Решение ОЗК напрямую связано с основной целью манипулятора – расположением рабочего органа с определенной позицией и ориентацией. Трудность решения ОЗК заключается в том, что  сложно аналитически выразить из сложно аналитически выразить из  . Кроме того, для манипуляторов с числом степеней свободы . Кроме того, для манипуляторов с числом степеней свободы  , для точек a и b при , для точек a и b при  задача (1) может давать задача (1) может давать  . Поэтому существует более одного решения (4), т.е. функция многоэкстремальная. При этом эти решения могут сильно отличаться друг от друга. . Поэтому существует более одного решения (4), т.е. функция многоэкстремальная. При этом эти решения могут сильно отличаться друг от друга.
Решение обратной задачи кинематики комбинированным поисковым методом
Для манипулятора с n звеньями комбинированный поисковой метод решает следующую задачу оптимизации:
 , (5) , (5)
где  , t – непрерывное время, , t – непрерывное время,  – начальное значение обобщенных координат i-го звена, – начальное значение обобщенных координат i-го звена,  – нормированная сумма длин звеньев манипулятора с i-го до n-го, – нормированная сумма длин звеньев манипулятора с i-го до n-го,  – функциональное ограничение на положение и ориентацию рабочего органа равное: – функциональное ограничение на положение и ориентацию рабочего органа равное:
 (6) (6)
 , (7) , (7)
 , (8) , (8)
 , (9) , (9)
где  , ,  , ,  расстояния от текущего (для момента времени t) положения РО манипулятора до цели по осям расстояния от текущего (для момента времени t) положения РО манипулятора до цели по осям  , ,  и и  соответственно; соответственно;  , ,  – угол между осью системы координат цели и соответствующей осью системы координат РО манипулятора; положения и ориентации цели обозначаются подстрочным индексом «ц», а индексом «м» обозначаются текущие положения и ориентации манипулятора; – угол между осью системы координат цели и соответствующей осью системы координат РО манипулятора; положения и ориентации цели обозначаются подстрочным индексом «ц», а индексом «м» обозначаются текущие положения и ориентации манипулятора;  – штрафной коэффициент – штрафной коэффициент  , отражающий влияние расстояния до цели на значение . , отражающий влияние расстояния до цели на значение .
Комбинированный поисковой метод представляет собой генетический алгоритм в сочетании с симплексным поиском (СП). На каждом шаге генетического алгоритма создается популяция особей, каждая особь представляет собой точку в пространстве поиска. Так как решением ОЗК для манипулятора с n степенями является вектор  , то каждая особь КПМ , то каждая особь КПМ  является вектором является вектором  . Здесь . Здесь  номер вершины, S – число особей в данной популяции. Аналогичное представление имеют вершины симплекса в КПМ. номер вершины, S – число особей в данной популяции. Аналогичное представление имеют вершины симплекса в КПМ.
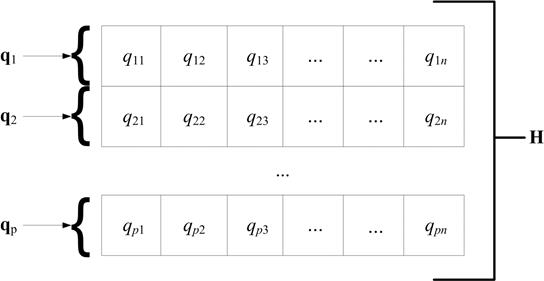
Рис. 2 – Представление особи(вершины) в КПМ при решении ОЗК
Поиск происходит по следующему алгоритму:
1) создается k-я популяция генетического алгоритма  объемом S; объемом S;
2) вычисляется целевая функция  , для каждой вершины из ; , для каждой вершины из ;
3) особи в популяции сортируются по увеличению (поиск минимума) целевой функции  ; ;
4) первые  особей назначаются центрами для симплексов; особей назначаются центрами для симплексов;
5) производится симплексный поиск из всех центров. Результаты каждого симплексного поиска записывают в матрицу H размерности  (рис.2); (рис.2);
6)  –строка H, –строка H,  сравнивается с лучшей особью популяции, и если сравнивается с лучшей особью популяции, и если  , то , то  ; ;
7)  ; ;
8) проверка условий останова:  , где , где  – максимальное число шагов алгоритма: если условия не выполнены переход к п.1, иначе переход в п.9; – максимальное число шагов алгоритма: если условия не выполнены переход к п.1, иначе переход в п.9;
9) вывод результата.
В данной работе движение цели это изменение во времени координат  , ,  , ,  , а значения , а значения  , ,  , ,  остаются постоянными. Делается допущение, что измерение нового положения цели происходит без задержек времени и учитывается только время, затраченное на вычисления КПМ. В каждый момент времени известно только текущее положение и ориентация цели. остаются постоянными. Делается допущение, что измерение нового положения цели происходит без задержек времени и учитывается только время, затраченное на вычисления КПМ. В каждый момент времени известно только текущее положение и ориентация цели.
Задачу (5) запишем в виде:
 , (10) , (10)
где
 , (11) , (11)
 , (12) , (12)
 . .
Здесь  , ,  ; ;  – весовые коэффициенты штрафов, изменение которых влияет на точность и гладкость решения. Штраф – весовые коэффициенты штрафов, изменение которых влияет на точность и гладкость решения. Штраф  увеличивается при приближении к позиционным ограничениям [26]. увеличивается при приближении к позиционным ограничениям [26].
Целевая функция (10) отражает вертикальный дрейф экстремума функции, обусловленный изменением во времени ограничения (6). Идентификацию параметров дрейфа реализуем за счет дополнительного (повторного) эксперимента в каждой текущей вершине КПМ. Для этого аппроксимируем функциональное ограничение на интервале  выражением вида выражением вида
 , (13) , (13)
где  – евклидова норма, – евклидова норма,  вектор оценок дрейфа цели вдоль осей OX, OY, OZ в j-й вершине; вектор оценок дрейфа цели вдоль осей OX, OY, OZ в j-й вершине;  – интервал времени между повторными измерениями положения цели в j-й вершине КПМ; <2, 1> – номер эксперимента. – интервал времени между повторными измерениями положения цели в j-й вершине КПМ; <2, 1> – номер эксперимента.
Для поиска лучшей вершины КПМ рассчитаем компенсированное (с учетом дрейфа цели) значение целевой функции
 , (14) , (14)
где  – время вычисления в j-й вершине; – время вычисления в j-й вершине;   для ГА, и для ГА, и  , ,  для СП. Компенсация влияния дрейфа для ГА проводится после проведения экспериментов во всех S вершинах, а в СП на каждом шаге поиска для n+1 вершин текущего симплекса относительно s-ой вершины. Временная диаграмма оценки и компенсации представлена на рис.3. для СП. Компенсация влияния дрейфа для ГА проводится после проведения экспериментов во всех S вершинах, а в СП на каждом шаге поиска для n+1 вершин текущего симплекса относительно s-ой вершины. Временная диаграмма оценки и компенсации представлена на рис.3.
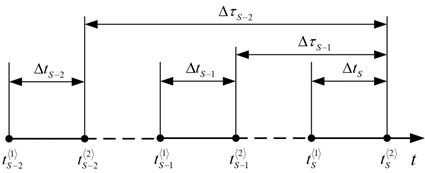
Рис. 3 – Интервалы времени при оценке и компенсации дрейфа
Вектор оценок  (13), рассчитывается на основе вектора текущих положений звеньев и вектора расстояний от рабочего органа до цели по осям OX, OY и OZ соответственно (13), рассчитывается на основе вектора текущих положений звеньев и вектора расстояний от рабочего органа до цели по осям OX, OY и OZ соответственно  . .
Обозначим вектор оценок изменения расстояний  ; – время повторного измерения вектора ; – время повторного измерения вектора  в вершине j. Тогда оценка скорости дрейфа в момент времени tj равна: в вершине j. Тогда оценка скорости дрейфа в момент времени tj равна:
 (15) (15)
 (16) (16)
 (17) (17)
 (18) (18)

Здесь  – матрица весовых коэффициентов, – матрица весовых коэффициентов,  – единичная матрица размерности – единичная матрица размерности  . Выражения (15)-(18) рассчитываются для каждой вершины КПМ. Для расчета (13) в ГА используется оценка . Выражения (15)-(18) рассчитываются для каждой вершины КПМ. Для расчета (13) в ГА используется оценка  , полученная в последней вершине S, в СП используется оценка , полученная в отраженной вершине. Матрица весов , полученная в последней вершине S, в СП используется оценка , полученная в отраженной вершине. Матрица весов  имеет постоянные большие значения на главной диагонали исходя из предположения, что скорость дрейфа может меняться в широком диапазоне значений на протяжении всего времени оценки. имеет постоянные большие значения на главной диагонали исходя из предположения, что скорость дрейфа может меняться в широком диапазоне значений на протяжении всего времени оценки.
Алгоритм решения обратной задачи кинематики многозвенного манипулятора комбинированным поисковым методом:
 ; ;
1) создается популяция размером S:
-
-
- выбор родителей;
- скрещивание;
- мутации;
2) для рассчитываем:
-
-
- значение целевой функции
 (10); (10);
- изменение расстояния (16) по каждой оси:
 , ,  , ,  ; ;
- время (17);
- вектор параметров (15);
3) для вычисляется  и целевая функция КПМ и целевая функция КПМ  (14); (14);
4) особи популяции сортируются в порядке возрастания ;
5) из выбираются первые особей, которые становятся центрами симплексных поисков;  , ,  – счетчик шагов l-го СП, ; – счетчик шагов l-го СП, ;
6) для l-го симплекса производятся процедуры:
-
-
- отражение;
- растяжение;
- сжатие;
7) для s-й вершины l-го симплекса, где s–индекс отраженной вершины симплекса:
-
-
- значение целевой функции
 (10); (10);
- изменение расстояния (16) по каждой оси:
 , ,  , ,  ; ;
- измерение времени
 (17) и (17) и  ; ;
- обновляется вектор параметров
 (15); (15);
8) для  вычисляется значение целевой функции КПМ вычисляется значение целевой функции КПМ  (14); (14);
9)  ; ;
10) проверка условий останова  , ,  – максимальное число шагов l-го СП: – максимальное число шагов l-го СП:
-
-
- если условия не выполнены переход к п.6;
- заполняем матрицу
 , ,  , где , где  – результат l-го СП; – результат l-го СП;
11) результаты работы симплексных поисков: матрица H размером , обновленный вектор ;
12) каждая строка изH,  сравнивается с лучшей особью сравнивается с лучшей особью  из популяции: из популяции:
-
-
- вычисляется
 и и  ; ;
- если
 , то , то  ; ;
13)  ; ;
14) проверка условий останова ГА : если условия не выполнены переход к п.1;
15) вывод результата.
Экспериментальные исследования
Эксперименты проводились на моделях манипулятора в среде MATLAB. Эксперимент 1: Рассмотрим трехзвенный манипулятор, работающий в плоскости  декартовой системы координат и имеющий число степеней свободы декартовой системы координат и имеющий число степеней свободы  и и  (рис.4). (рис.4).
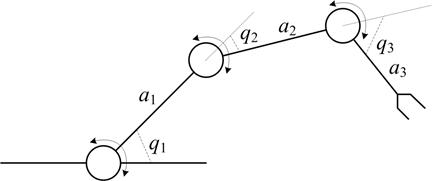
Рис. 4 – Кинематика трехзвенного плоского манипулятора
Данный манипулятор не является избыточным  , поэтому ОЗК имеет малое ( , поэтому ОЗК имеет малое ( ) число решений. Параметры Денавита-Хартенберга для манипулятора представлены в таблице 2 ) число решений. Параметры Денавита-Хартенберга для манипулятора представлены в таблице 2
Таблица 2 – Параметры трехзвенного плоского манипулятора
|
Звено
|
Звено 1
|
Звено 2
|
Звено 3
|
|
Параметр
|
|
|
0
|
0
|
0
|
|
, рад.
|
0
|
0
|
0
|
|
, м.
|
0.500
|
0.670
|
0.200
|
|
, м.
|
0
|
0
|
0
|
|
 , град , град
|
-170, 170
|
-170, 170
|
-170, 170
|
В таблице 3 представлены параметры КПМ, обеспечивающие максимальное быстродействие и точность поиска. Поскольку для плоского манипулятора трёх вращательных степеней свободы достаточно для обеспечения положения и ориентации рабочего органа, то вес  установлен соответствующим образом. Выбор значений весов установлен соответствующим образом. Выбор значений весов  , ,  , ,  из (10) обусловлен необходимостью уменьшения (6) до нуля, поэтому намного больше остальных. Вес из (10) обусловлен необходимостью уменьшения (6) до нуля, поэтому намного больше остальных. Вес  имеет наименьшее значение поскольку (12) должно иметь значительное влияние на целевую функцию только вблизи позиционных ограничений. Вес получается из условия равенства суммы весов единице. имеет наименьшее значение поскольку (12) должно иметь значительное влияние на целевую функцию только вблизи позиционных ограничений. Вес получается из условия равенства суммы весов единице.
Таблица 3 – Параметры поиска для эксперимента 1
|
Параметр
|
Размер популяции
s
|
Вес
|
Количество симплексов
|
Веса

|
|
Значение
|
10
|
0.5
|
4
|
|
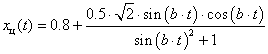
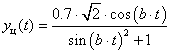
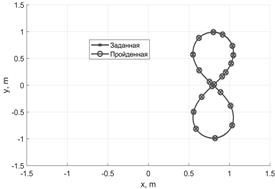
Движение цели происходило по траекториям, представленным в таблице 4. Траектория 1 – прямая в плоскости с фиксированной координатой xи рабочим органом, ориентированным в сторону положительного направления оси x0. Траектория 2 – лемниската Бернулли в плоскости с рабочим органом, ориентированным в сторону положительного направления оси x0.
Таблица 4–Траектории для испытания плоского манипулятора
|
|
Траектория 1
|
Траектория 2
|
|
, м
|

|
|
|
, м
|

|
|
|

|

|
|
|
 , м/с , м/с
|

|
1
|
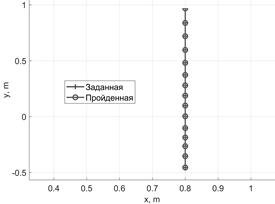
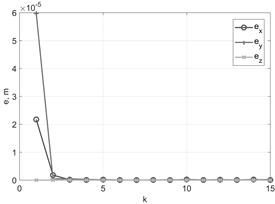
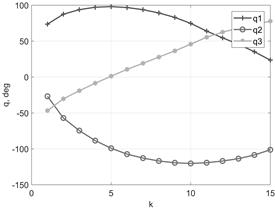
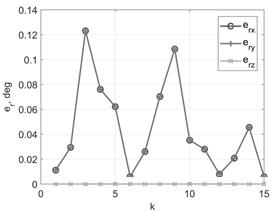
Построенные траектории движения рабочего органа представлены на рис. 5 и рис. 6.
а)
б)
в)
г)
Рис. 5– Результаты решения ОЗК для траектории 1: а) заданная и пройденная траектории; б) ошибки положения; в) траектории обобщенных координат; г) ошибки ориентации
а)
б)
в)
г)
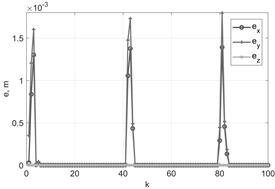
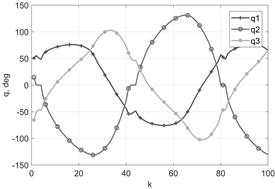
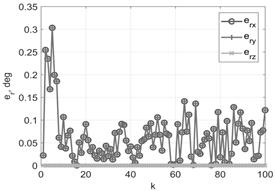
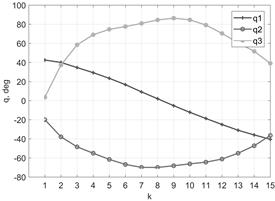
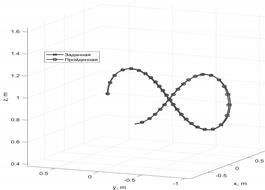
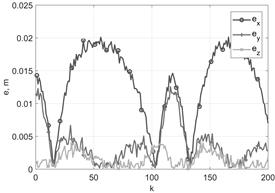
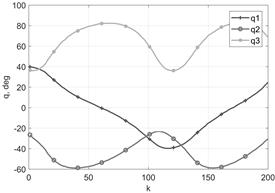
Рис. 6– Результаты решения ОЗК для траектории 2: а) заданная и пройденная траектории; б) ошибки положения; в) траектории обобщенных координат; г) ошибки ориентации
Из рис. 5а и рис. 6а видно, что траектория рабочего органа проходит достаточно близко к траектории цели. Как показывают рис. 5б и рис. 6б ошибки положения в рабочем пространстве находится в диапазоне 10-3 метра. По рисункам 5в и 6в видно, что простроенные траектории не имеют скачкообразных изменений обобщенных координат и пригодны для дальнейшего использования в качестве задающего воздействия регулятора привода манипулятора.
Эксперимент 2: Рассмотрим трехзвенный манипулятор, работающий в пространстве  (рис. 7). Поскольку число степеней свободы манипулятора ( (рис. 7). Поскольку число степеней свободы манипулятора ( ) меньше числа степеней свободы рабочего пространства ) меньше числа степеней свободы рабочего пространства  , то проведем задачу оптимизации по положению, игнорируя ориентацию рабочего органа. В таблице 5 приведены параметры кинематики манипулятора. , то проведем задачу оптимизации по положению, игнорируя ориентацию рабочего органа. В таблице 5 приведены параметры кинематики манипулятора.
Таблица 5 – Параметры трехзвенного манипулятора
|
Звено
|
Звено 1
|
Звено 2
|
Звено 3
|
|
Параметр
|
|
|
0
|
0
|
0
|
|
, рад.
|

|
0
|
0
|
|
, м.
|
0
|
0.500
|
0.650
|
|
, м.
|
0.700
|
0
|
0
|
|
, град
|
-170, 170
|
-90, 0
|
0, 90
|
Поскольку размерность пространства поиска не изменилась, то использовались параметры поиска из эксперимента 1, за исключением параметра . Параметры поиска для трехзвенного пространственного манипулятора представлены в таблице 6.
Таблица 6 – Параметры поиска для эксперимента 2
|
Параметр
|
Размер популяции
s
|
Вес
|
Количество симплексов

|
Веса
|
|
Значение
|
10
|
1
|
4
|
|
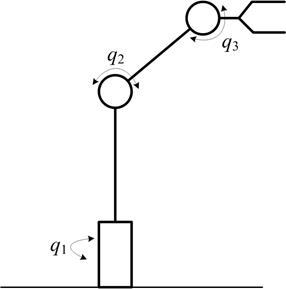
Рис. 7– Кинематика трехзвенного пространственного манипулятора
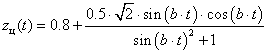
Траектории для испытания схожи с траекториями для эксперимента 1. Траектория 1 – прямая в плоскости параллельной , траектория 2 – лемниската Бернулли, расположенная в плоскости параллельной  . .
Таблица 7–Траектории для испытания пространственного манипулятора
|
|
Траектория 1
|
Траектория 2
|
|
, м
|
|

|
|
, м
|
|
|
|
, м
|

|
|
|
,
|

|
|
|
, м/с
|

|
1
|
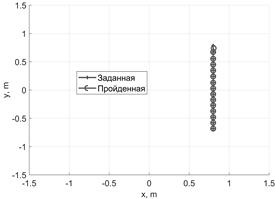
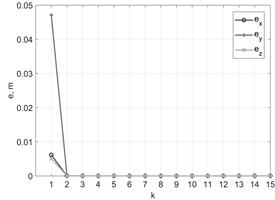
Результаты эксперимента на рис. 8 и рис. 9.
а)
б)
в)
Рис. 8– Результаты решения ОЗК для траектории 1: а) заданная и пройденная траектории; б) ошибки положения; в) траектории обобщенных координат
а)
б)
в)
Рис. 9– Результаты решения ОЗК для траектории 2: а) заданная и пройденная траектории; б) ошибки по осям координат; в) траектории обобщенных координат
По результатам можно убедиться, что алгоритм способен строить плавные траектории для не избыточных пространственных манипуляторов, а так же отклоняться от траектории без скачков обобщенных координат, когда их значения приближаются к граничным. На (рис.9б) видны значительные изменения ошибки по одной из координат. Они связанны с выбором параметров функции (10), при увеличении параметра уменьшится ошибка, но траектория в пространстве обобщенных координат будет проходить ближе к позиционным ограничениям.
Эксперимент 3: Рассмотрим семизвенный манипулятор, представленный на рис.10. Такая конструкция является избыточной в кинематическом смысле (n>m). Это значит, что он способен обеспечить произвольную ориентацию рабочего органа в рабочей области. Такие манипуляторы имеют большое число решений ОЗК.
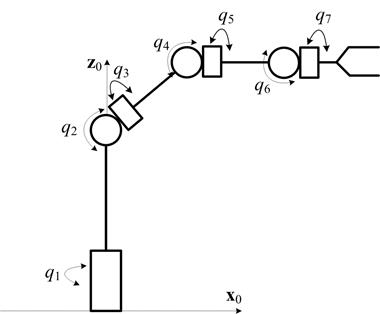
Рис. 10 – Кинематическая схема семизвенного манипулятора
Кинематические параметры указаны в таблице 8.
Таблица 8 – Параметры семизвенного манипулятора
|
Звено
|
Звено 1
|
Звено 2
|
Звено 3
|
Звено 4
|
Звено 5
|
Звено 6
|
Звено 7
|
|
Параметр
|
|
|
0
|
0
|
0
|
0
|
0
|
0
|
0
|
|
, рад.
|

|
|
|
|
|
|
0
|
|
, м.
|
0
|
0
|
0.650
|
0
|
0
|
0
|
0
|
|
, м.
|
0.700
|
0
|
0.500
|
0
|
0.600
|
0
|
0.200
|
|
, град
|
-180, 180
|
-110, 110
|
-180, 180
|
-110, 110
|
-170, 170
|
-90, 90
|
-180, 180
|
Поскольку размерность пространства и число экстремумов возросло по сравнению с экспериментами 1 и 2, то эксперимент 3 проводился с большим объемом популяции и количеством симплексов на популяцию. Поскольку конструкция позволяет отслеживать ориентацию рабочего органа, то вес установлен в 0.5. Параметры поиска представлены в таблице 9.
Таблица 9 – Параметры поиска для эксперимента 3
|
Параметр
|
Размер популяции
s
|
Приоритет поиска
|
Количество симплексов
|
Веса
|
|
Значение
|
30
|
0.5
|
3
|
|
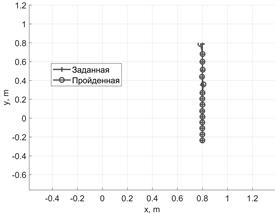
Для этого эксперимента были использованы траектории из эксперимента 2. Результаты эксперимента на рис. 11 и рис. 12.
а)
б)
в)
г)
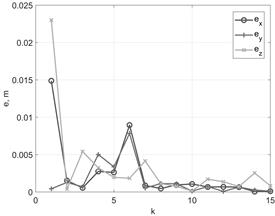
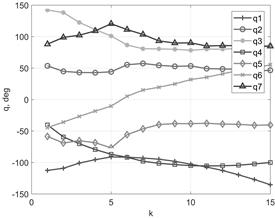
Рис. 11– Результаты решения ОЗК для траектории 1: а) заданная и пройденная траектории; б) ошибки положения; в) траектории обобщенных координат; г) ошибки ориентации
а)
б)
в)
г)
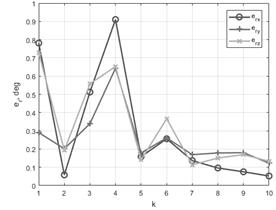
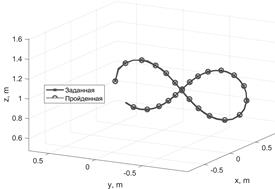
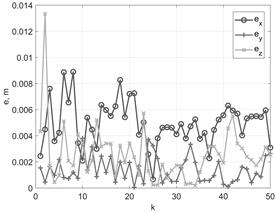
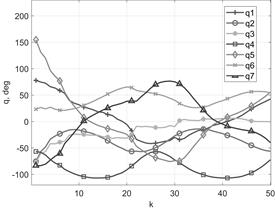
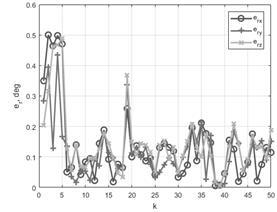
Рис. 12– Результаты решения ОЗК для траектории 2: а) заданная и пройденная траектории; б) ошибки положения; в) траектории обобщенных координат; г) ошибки ориентации
Несмотря на большое число потенциальных решений ОЗК, алгоритм строит траекторию рабочего органа с ошибкой менее 0.01 м и плавными траекториями обобщенных координат.
По результатам экспериментов наблюдается успешное решение ОЗК для не избыточных и избыточных манипуляторов. Видно, что решение получается с ошибкой, не превышающей 0.01м, кроме случаев, когда обобщенные координаты приближаются к граничным значениям. Такая точность достигается за одну итерацию КПМ благодаря глобальным свойствам ГА и эффективности СП.
Заключение
Решена обратная задача кинематики в условиях движущейся цели при помощи комбинированного поискового метода для избыточных и не избыточных манипуляторов. Оценки скорости дрейфа цели позволяют ГА и СП принимать верные решения при движении к экстремуму, находя такие значения обобщенных координат которые приближают РО к цели.
Рассчитанные траектории плавные и не выходят за допустимые границы. Плавность траектории в пространстве обобщенных координат связана с использованием целевой функции (5) , которая позволяет КПМ выбрать из множества решений ОЗК только те, которые требуют минимальных перемещений.
Возможность выбора из набора вариантов дает КПМ преимущество по сравнению с классическими итерационными алгоритмами решения ОЗК и другими алгоритмами, основанных на одном критерии поиска. Это преимущество выражается в возможности получения глобального решения основанного на сумме критериев (10) за несколько итераций поиска. Данный алгоритм прост для реализации и пригоден для параллельного вычисления.
Библиография
1. Orin D. E., Schrader W. W. Efficient computation of the Jacobian for robot manipulators // The International Journal of Robotics Research. – 1984. – Vol. 3. – No. 4. – P. 66-75.
2. Whitney D. E. Resolved motion rate control of manipulators and human prostheses //I EEE Transactions on man-machine systems. – 1969. – Vol. 10. – No. 2. – P. 47-53.
3. Yoshida K., Umetani Y. Control of space free-flying robot // Decision and Control, 1990., Proceedings of the 29th IEEE Conference on. – IEEE, 1990. – P. 97-102.
4. Piepmeier J. A., McMurray G. V., Lipkin H. Tracking a moving target with model independent visual servoing: A predictive estimation approach // Robotics and Automation, 1998. Proceedings. 1998 IEEE International Conference on. – IEEE, 1998. – Vol. 3. – P. 2652-2657.
5. Sanchez-Sanchez P., Reyes-Cortes F. A new cartesian controller for robot manipulators // Intelligent Robots and Systems, 2005.(IROS 2005). 2005 IEEE/RSJ International Conference on. – IEEE, 2005. – P. 3733-3739.
6. Gamarra D. F. T., Cuadros M. A. S. L. Forward models for following a moving target with the puma 560 robot manipulator // Inteligencia Artificial. – 2015. – Vol. 18. – No. 56. – P. 31-42.
7. Kim M. S. et al. Robot visual servo through trajectory estimation of a moving object using Kalman filter // Emerging Intelligent Computing Technology and Applications. – 2009. – P. 1122-1130.
8. Wang C., Lin C. Y., Tomizuka M. Design of kinematic controller for real-time vision guided robot manipulators // Robotics and Automation (ICRA), 2014 IEEE International Conference on. – IEEE, 2014. – P. 4141-4146.
9. Houshangi N. Control of a robotic manipulator to grasp a moving target using vision // Robotics and Automation, 1990. Proceedings., 1990 IEEE International Conference on. – IEEE, 1990. – P. 604-609.
10. Liu Y. et al. Tracking of a moving target by combination of force/velocity control based on vision for a hydraulic manipulator // Mechatronics and Automation, 2007. ICMA 2007. International Conference on. – IEEE, 2007. – P. 3226-3231.
11. LaValle S. M. Planning algorithms. – Cambridge university press, 2006. – P. 1007.
12. Hirano Y., Kitahama K., Yoshizawa S. Image-based object recognition and dexterous hand/arm motion planning using rrts for grasping in cluttered scene // Intelligent Robots and Systems, 2005.(IROS 2005). 2005 IEEE/RSJ International Conference on. – IEEE, 2005. – P. 2041-2046.
13. Stilman M. et al. Manipulation planning among movable obstacles // Robotics and Automation, 2007 IEEE International Conference on. – IEEE, 2007. – P. 3327-3332.
14. Bertram D. et al. An integrated approach to inverse kinematics and path planning for redundant manipulators // Robotics and Automation, 2006. ICRA 2006. Proceedings 2006 IEEE International Conference on. – IEEE, 2006. – P. 1874-1879.
15. Drumwright E., Ng-Thow-Hing V. Toward interactive reaching in static environments for humanoid robots // Intelligent Robots and Systems, 2006 IEEE/RSJ International Conference on. – IEEE, 2006. – P. 846-851.
16. Chaabaani A., Bellamine M. S., Gasmi M. Controlling a Humanoid Robot Arm for Grasping and Manipulating a Moving Object without Cameras // International Journal of Information and Electronics Engineering. – 2015. – Vol. 5. – No. 4. – P. 286.
17. Bingul Z., Ertunc H. M., Oysu C. Applying neural network to inverse kinematic problem for 6R robot manipulator with offset wrist // Adaptive and Natural Computing Algorithms. – Springer, Vienna, 2005. – P. 112-115.
18. Köker R., Çakar T., Sari Y. A neural-network committee machine approach to the inverse kinematics problem solution of robotic manipulators // Engineering with Computers. – 2014. – Vol. 30. – No. 4. – P. 641-649.
19. Karlik B., Aydin S. An improved approach to the solution of inverse kinematics problems for robot manipulators // Engineering applications of artificial intelligence. – 2000. – Vol. 13. – No. 2. – P. 159-164.
20. Feng Y., Yao-nan W., Yi-min Y. Inverse kinematics solution for robot manipulator based on neural network under joint subspace // International Journal of Computers Communications & Control. – 2014. – Vol. 7. – No. 3. – P. 459-472.
21. Birbil Ş. İ., Fang S. C. An electromagnetism-like mechanism for global optimization // Journal of global optimization. – 2003. – Vol. 25. – No. 3. – P. 263-282.
22. Parker J. K., Khoogar A. R., Goldberg D. E. Inverse kinematics of redundant robots using genetic algorithms //Robotics and Automation, 1989. Proceedings., 1989 IEEE International Conference on. – IEEE, 1989. – P. 271-276.
23. Momani S., Abo-Hammour Z. S., Alsmadi O. M. K. Solution of inverse kinematics problem using genetic algorithms // Applied Mathematics & Information Sciences. – 2016. – Т. 10. – No. 1. – P. 225.
24. da Graca Marcos M., Machado J. A. T., Azevedo-Perdicoulis T. P. Trajectory planning of redundant manipulators using genetic algorithms // Communications in nonlinear science and numerical simulation. – 2009. – Vol. 14. – No. 7. – P. 2858-2869.
25. Peng Y., Wei W. A new trajectory planning method of redundant manipulator based on adaptive simulated annealing genetic algorithm (ASAGA) // Computational Intelligence and Security, 2006 International Conference on. – IEEE, 2006. – Vol. 1. – P. 262-265.
26. Wang J., Li Y., Zhao X. Inverse kinematics and control of a 7-DOF redundant manipulator based on the closed-loop algorithm // International Journal of Advanced Robotic Systems. – 2010. – Vol. 7. – No. 4. – P. 1-9.
References
1. Orin D. E., Schrader W. W. Efficient computation of the Jacobian for robot manipulators // The International Journal of Robotics Research. – 1984. – Vol. 3. – No. 4. – P. 66-75.
2. Whitney D. E. Resolved motion rate control of manipulators and human prostheses //I EEE Transactions on man-machine systems. – 1969. – Vol. 10. – No. 2. – P. 47-53.
3. Yoshida K., Umetani Y. Control of space free-flying robot // Decision and Control, 1990., Proceedings of the 29th IEEE Conference on. – IEEE, 1990. – P. 97-102.
4. Piepmeier J. A., McMurray G. V., Lipkin H. Tracking a moving target with model independent visual servoing: A predictive estimation approach // Robotics and Automation, 1998. Proceedings. 1998 IEEE International Conference on. – IEEE, 1998. – Vol. 3. – P. 2652-2657.
5. Sanchez-Sanchez P., Reyes-Cortes F. A new cartesian controller for robot manipulators // Intelligent Robots and Systems, 2005.(IROS 2005). 2005 IEEE/RSJ International Conference on. – IEEE, 2005. – P. 3733-3739.
6. Gamarra D. F. T., Cuadros M. A. S. L. Forward models for following a moving target with the puma 560 robot manipulator // Inteligencia Artificial. – 2015. – Vol. 18. – No. 56. – P. 31-42.
7. Kim M. S. et al. Robot visual servo through trajectory estimation of a moving object using Kalman filter // Emerging Intelligent Computing Technology and Applications. – 2009. – P. 1122-1130.
8. Wang C., Lin C. Y., Tomizuka M. Design of kinematic controller for real-time vision guided robot manipulators // Robotics and Automation (ICRA), 2014 IEEE International Conference on. – IEEE, 2014. – P. 4141-4146.
9. Houshangi N. Control of a robotic manipulator to grasp a moving target using vision // Robotics and Automation, 1990. Proceedings., 1990 IEEE International Conference on. – IEEE, 1990. – P. 604-609.
10. Liu Y. et al. Tracking of a moving target by combination of force/velocity control based on vision for a hydraulic manipulator // Mechatronics and Automation, 2007. ICMA 2007. International Conference on. – IEEE, 2007. – P. 3226-3231.
11. LaValle S. M. Planning algorithms. – Cambridge university press, 2006. – P. 1007.
12. Hirano Y., Kitahama K., Yoshizawa S. Image-based object recognition and dexterous hand/arm motion planning using rrts for grasping in cluttered scene // Intelligent Robots and Systems, 2005.(IROS 2005). 2005 IEEE/RSJ International Conference on. – IEEE, 2005. – P. 2041-2046.
13. Stilman M. et al. Manipulation planning among movable obstacles // Robotics and Automation, 2007 IEEE International Conference on. – IEEE, 2007. – P. 3327-3332.
14. Bertram D. et al. An integrated approach to inverse kinematics and path planning for redundant manipulators // Robotics and Automation, 2006. ICRA 2006. Proceedings 2006 IEEE International Conference on. – IEEE, 2006. – P. 1874-1879.
15. Drumwright E., Ng-Thow-Hing V. Toward interactive reaching in static environments for humanoid robots // Intelligent Robots and Systems, 2006 IEEE/RSJ International Conference on. – IEEE, 2006. – P. 846-851.
16. Chaabaani A., Bellamine M. S., Gasmi M. Controlling a Humanoid Robot Arm for Grasping and Manipulating a Moving Object without Cameras // International Journal of Information and Electronics Engineering. – 2015. – Vol. 5. – No. 4. – P. 286.
17. Bingul Z., Ertunc H. M., Oysu C. Applying neural network to inverse kinematic problem for 6R robot manipulator with offset wrist // Adaptive and Natural Computing Algorithms. – Springer, Vienna, 2005. – P. 112-115.
18. Köker R., Çakar T., Sari Y. A neural-network committee machine approach to the inverse kinematics problem solution of robotic manipulators // Engineering with Computers. – 2014. – Vol. 30. – No. 4. – P. 641-649.
19. Karlik B., Aydin S. An improved approach to the solution of inverse kinematics problems for robot manipulators // Engineering applications of artificial intelligence. – 2000. – Vol. 13. – No. 2. – P. 159-164.
20. Feng Y., Yao-nan W., Yi-min Y. Inverse kinematics solution for robot manipulator based on neural network under joint subspace // International Journal of Computers Communications & Control. – 2014. – Vol. 7. – No. 3. – P. 459-472.
21. Birbil Ş. İ., Fang S. C. An electromagnetism-like mechanism for global optimization // Journal of global optimization. – 2003. – Vol. 25. – No. 3. – P. 263-282.
22. Parker J. K., Khoogar A. R., Goldberg D. E. Inverse kinematics of redundant robots using genetic algorithms //Robotics and Automation, 1989. Proceedings., 1989 IEEE International Conference on. – IEEE, 1989. – P. 271-276.
23. Momani S., Abo-Hammour Z. S., Alsmadi O. M. K. Solution of inverse kinematics problem using genetic algorithms // Applied Mathematics & Information Sciences. – 2016. – T. 10. – No. 1. – P. 225.
24. da Graca Marcos M., Machado J. A. T., Azevedo-Perdicoulis T. P. Trajectory planning of redundant manipulators using genetic algorithms // Communications in nonlinear science and numerical simulation. – 2009. – Vol. 14. – No. 7. – P. 2858-2869.
25. Peng Y., Wei W. A new trajectory planning method of redundant manipulator based on adaptive simulated annealing genetic algorithm (ASAGA) // Computational Intelligence and Security, 2006 International Conference on. – IEEE, 2006. – Vol. 1. – P. 262-265.
26. Wang J., Li Y., Zhao X. Inverse kinematics and control of a 7-DOF redundant manipulator based on the closed-loop algorithm // International Journal of Advanced Robotic Systems. – 2010. – Vol. 7. – No. 4. – P. 1-9.
Ссылка на эту статью
Просто выделите и скопируйте ссылку на эту статью в буфер обмена. Вы можете также
попробовать найти похожие
статьи
|
|





